Nalgebra 3D matrix transform_vector()
⚓ Rust 📅 2025-08-27 👤 surdeus 👁️ 24

The AI gave me this test:
#[test]
fn matrix_translation() {
let mut m = Matrix3d::identity();
m.set_position(Vector3d(1.0, 2.0, 3.0, 0.0));
assert_eq!(m.position(), Vector3d(1.0, 2.0, 3.0, 0.0));
let v = Vector3d(0.0, 0.0, 0.0, 0.0);
let t = m.transform_vector(v);
assert_eq!(t, Vector3d::new(1.0, 2.0, 3.0, 0.0));
}
It's panicking at the assert_eq!(t, Vector3d::new(1.0, 2.0, 3.0, 0.0)); line:
thread 'geom::matrix3d::tests::matrix_translation' (10124) panicked at crates\whack\src\geom\matrix3d.rs:828:9:
assertion `left == right` failed
left: (0, 0, 0)
right: (1, 2, 3)
Here are the relevant parts of Matrix3d:
// row-major order; mostly always built by nalgebra
pub struct Matrix3d(pub [f64; 16]);
impl Matrix3d {
pub fn identity() -> Self {
Self([
1.0, 0.0, 0.0, 0.0,
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
0.0, 0.0, 0.0, 1.0,
])
}
pub fn position(&self) -> Vector3d {
Vector3d(self.0[12], self.0[13], self.0[14], 0.)
}
pub fn set_position(&mut self, pos: Vector3d) {
self.0[12] = pos.0;
self.0[13] = pos.1;
self.0[14] = pos.2;
}
pub fn transform_vector(&self, v: Vector3d) -> Vector3d {
Vector3d::from(self.to_na().transform_vector(&v.to_na_3()))
}
/// Returns the `nagelbra` version of this matrix.
pub fn to_na(&self) -> nalgebra::Matrix4<f64> {
nalgebra::Matrix4::from_row_slice(&self.0)
}
}
Is it correct or wrong? Or is nalgebra not aware this is a 3D matrix (4x4)?
From Adobe documentation:
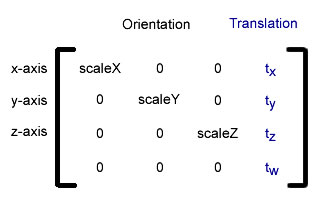
Note Vector3d has an optional component w, to comply mostly with the Adobe Display List.
1 post - 1 participant
🏷️ Rust_feed